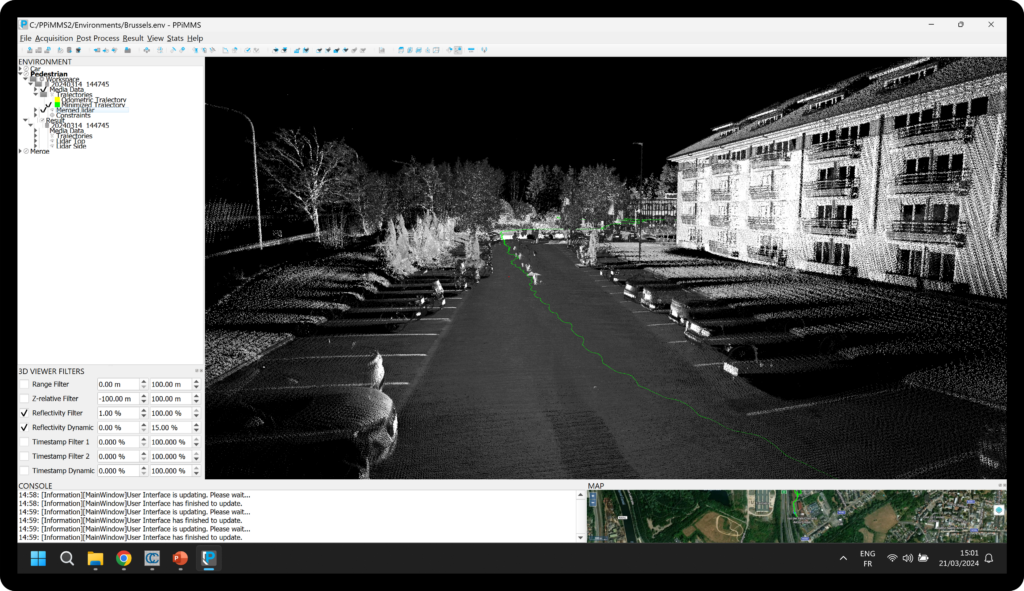
PPIMMS is a powerful software that processes all data from the Viametris systems. Through a simple and highly automated workflow, it accompanies the user to transform raw data into accurate colorized point clouds and high-resolution panoramic images.
While conceived to be easy to handle, PPIMMS also allows for advanced processing functionalities to expert users wanting to adjust data outputs to their specific needs. Need more range? Need unstitched images? All of this is possible.
PPIMMS’ output integrates into most industry-trusted third-party through universal formats such as LAS/LAZ/E57 and images location reading compatibility. Among others, Autodesk Recap ©, VisionLidar ©, Cintoo ©, Orbit 3DM Publisher ©, PointCab ©, TopoDOT ©, TerraScan ©, Limit Addict ©, AtisCloud ©, etc.

The best way to resolve the challenge of mobile mapping thanks to proprietary SLAM technology and INS+GNSS coupling.
Get drift-free point clouds thanks to a powerful loop closure algorithm that works even in the toughest conditions.
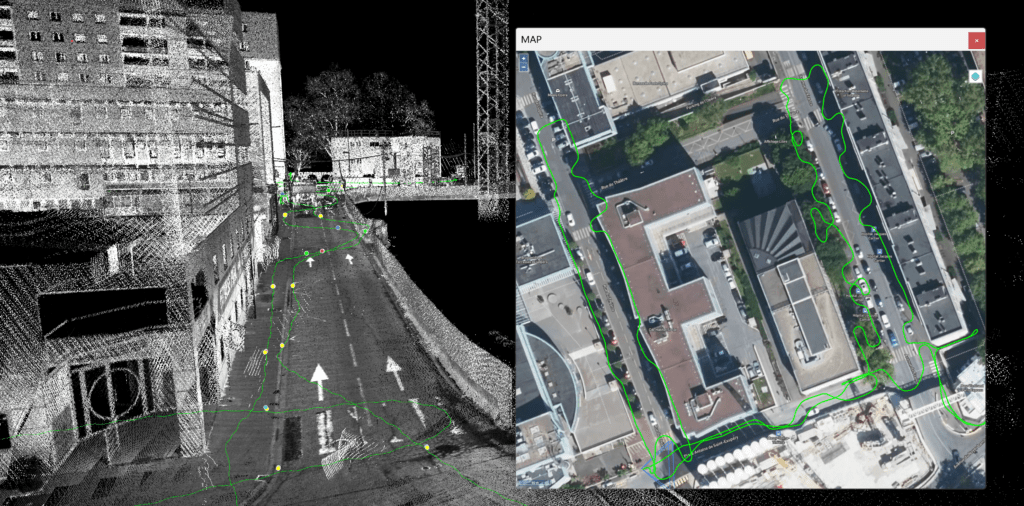
Reference your point cloud with a centimeter accuracy in any coordinate system used on the planet.
Improve the accuracy of your point clouds by adding control points to your trajectory computation.

Colorize your point clouds with high frequency image triggering for a realistic rendering.
Smartly get rid of unwanted or noisy data with point cloud filtering of moving objects and sensor noise.
Merge any number of datasets together and get rid of drifts between scans thanks to our proprietary merge algorithm. Point clouds can come from any Viametris systems and having been captured at any time. You can even lock some of the scans to make sure that past references are not shifting.
Use external point clouds to reference, automatically register or improve the absolute accuracy of your scans. A single click in an overlapping area is enough to create 3D matching between scans from Viametris systems and external files. A simple way to combine different field techniques and improve final deliverables.
Tweak the processing and adjust the output to your needs by manipulating the numerous settings available. Go meter by meter in a complicated scan and reprocess parts thanks to clever data splitting. This also allows you to obtain impeccable results even if problems occurred during the scan such as collision, slips or interferences.
The software license is local by default. Should you be interested by a cloud option, please get in touch with us to see how we can help you.
Yes. You can process as much as you want. You are not billed per sqm or equivalent.
Here are the minimum specs:
You cannot process raw data from other systems manufacturers. However you can use external scans to register your own Viametris raw data.
LAZ, LAS, E57, PTS, BIN.
Yes. By combining a point cloud file, an images folder and a camera trajectory path, you can use the images in third party software. We are already compatible with many existing in the industry: Cintoo, VisionLidar, AtisCloud, Publisher 3D, Point Cab, Topodot, LimitAddict, etc.